Competition Week 1
Week 8 (2/26 - 3/4)
Assembly
2/27 Monday
Pneumatics
Remove pneumatics from the robot
Electrical
Added a limit switch for the stowed position
Switched the navX to V2
Worked on CAN resistor
Robot Cart

Continued assembling the new robot cart
Completed Robot Cart Shown at Port Hueneme Regional
Motors
Figured out the problem with the V3 Falcons
Driver Station
Discussed driver station laptop and controller placement
Bumpers
Took measurements of the bumper fabric for embroidery
Packing
Worked on creating a new packing list for Port Hueneme Regional

Packed Milwaukees at Port Hueneme Regional
CAD
2/27
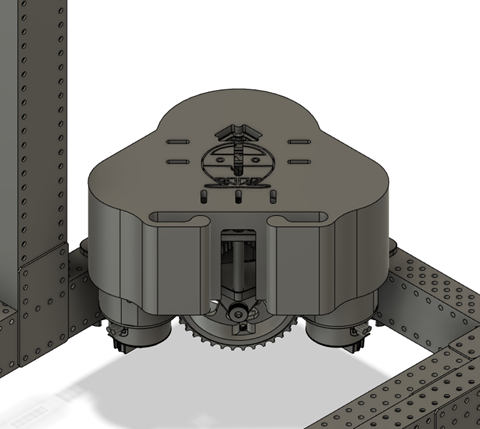
CAD of the swerve cover v4.5
Introducing… swerve cover version 4.5! Featuring zip tie holes for wire management, this design is sure to win the day!

Printed swerve cover v4.5
The print failed though… Guess we’ll have to redesign to accommodate this!
In addition, today we decided we wanted to improve our design for the robot cart. We successfully finished our CAD for our newly designed robot cart.
Manufacturing
Programming
This week, we cleaned up our code in preparation for the Port Hueneme Regional. We also tested our autos and finalized our charge auto for the competition, fixing an issue with our NavX orientations. We also tuned our arm and elevator motion magic code, refining our substation intake, ground intake, and low, middle, and high scoring postions. We also updated and printed our software binder in preparation for the competition.
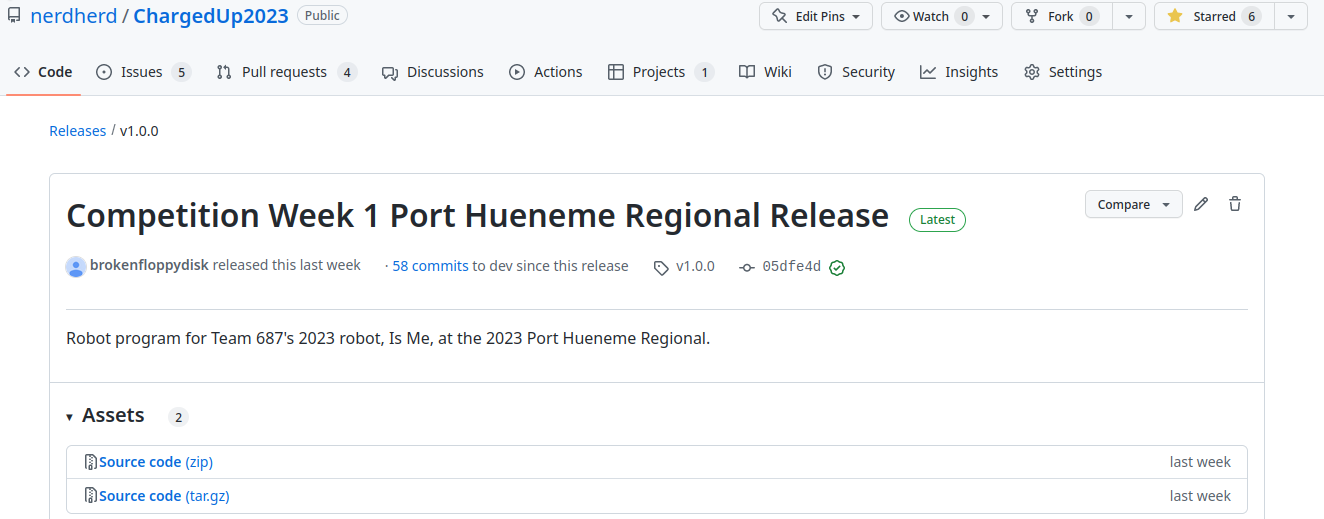
At the competition, we branched off our codebase into a separate branch. We discovered several issues at the competition, such as unreliability with our limit switch and charge auto. After the competition, we released our code as version 1.0.0.
Vision
Using our amazing limelights, we got our object detection to work on both gameobjects and scoring landmarks. Using this revolutinary technology of ours, we had the ability to drive to, pick up, and score either cones or cubes on the grid. A total of 4 pipelines were used to detect cone, cube, reflective tape, and april tag contours.
We -Organized / packed for comp -Ensured all limelights are labeled correctly -Debugged vision command sequence -Updated limelight config